Anwendungen
Contents
Anwendungen¶
%pylab inline
%pylab is deprecated, use %matplotlib inline and import the required libraries.
Populating the interactive namespace from numpy and matplotlib
# set default values for plotting:
rcParams['axes.titlesize'] = 14
rcParams['axes.labelsize'] = 14
rcParams['xtick.labelsize'] = 14
rcParams['ytick.labelsize'] = 14
rcParams['legend.fontsize'] = 12
rcParams['lines.linewidth'] = 2
Literatur¶
Schulz: Regelungstechnik 1
Philippsen: Einstieg in die Regelungstechnik
Jörgl: Repetitorium Regelungstechnik - Band 1
Haager: Regelungstechnik
Nise: Control Systems Engineering, Chapter 2 Modeling in the Frequency Domain
Papula: Band 2, VI, Laplace-Transformationen
Theorie - Zusammenfassung¶
Anfangs- und Endwertsatz¶
Rechnen mit Übertragungsfunktionen¶
Reihenschaltung: \(G(s) = G_1(s)G_2(s)\)
Parallelschaltung: \(G(s) = G_1(s) + G_2(s)\)
Rückkopplung: \(G(s) = \dfrac{G_1(s)}{1 + G_1(s)G_2(s)}\)
Frequenzgang¶
Der komplexe Verstärkungsfaktor eines harmonischen Inputs ist
mit \(\varphi\) dem Argument (Winkel, Phase) von \(G(j\omega))\).
Ortskurve: \(G(j\omega)\) in der komplexen Zahlenebene
Amplitudengang: \(|G(j\omega)|\)
Phasengang: \(\text{arg }G(j\omega)\)
Stabilität¶
Stabilität: Bei konstaten Eingangsgrößen muss der Ausgang auf einen konstanten Wert abklingen.
Damit ein System, das durch die Übertragungsfunktion
gegeben ist, stabil ist, müssen alle Nullstellen des Nennerpolynoms einen negativen Realanteil aufweisen. Alle Polstellen der Übertragungsfunktion müssen also in der linken Halbebene der komplexen Zahlenebene liegen.
Nyquistkriterium:
Das Nyquistkriterium liefert eine Aussage über die Stabilität des geschlossenen Regelkreises
aus dem Frequenzgang der offenen Systems \(G_o(s)\).
Man befindet sich an der Stabilitätsgrenze (imaginäre Achse), wenn
Wenn sich also der gechlossene Regelkreis an der Stabilitätsgrenze befindet, dann verläuft die Ortskurve des offenen Systems \(G_o(s)\) bei einer bestimmten Frequenz \(\omega_1\) durch den Punkt \((-1,0)\), den sogenannten Nyquistpunkt. Es gilt:
Verläuft die Ortskurve des offenen Systems \(G_o(s)\) in Richtung steigender \(\omega\)-Werte so, dass der Nyquistpunkt auf der linken Seite liegt, dann ist der geschlossene Regelkreis \(G_g(s)\) stabil.
Verläuft die Ortskurve des offenen Systems \(G_o(s)\) in Richtung steigender \(\omega\)-Werte so, dass der Nyquistpunkt auf der rechten Seite liegt, dann ist der geschlossene Regelkreis \(G_g(s)\) instabil.
Literatur: Philippsen, p. 142ff, Haager, p. 109, Schulz, Jörgl, Nise
Anwendungen¶
Regelungstechnik: Regler, Frequenzgang, Stabilität etc.
Aufgaben¶
Aufgabe 1: Endwertsatz¶
Eines System hat die Übertragungsfunktion \(G(s)= \frac{1}{s + 2}\). Bestimmen Sie mit dem Endwertsatz den Endwert der Sprungantwort.
Lösung: \(\frac{1}{2}\)
Aufgabe 2: Anfangs- und Endwertsatz¶
Bestimmen Sie das Verhalten von \(x(t)\) für \(t\rightarrow 0\) und \(t\rightarrow \infty\), wenn die Lapalacetransformierte \(X(s)\) von \(x(t)\) folgende Ausdrücke hat:
\(X(s) = \dfrac{6(s+2)}{(s+1)(s+3)(s+4)}\)
\(X(s) = \dfrac{s^2+2s+2}{s(s+1)^3(s+2)}\)
\(X(s) = \dfrac{32}{s^2(s+2)(s+4)}\)
Quelle: Jörgl: Repetitorium Regelungstechnik - Band 1. 2. Auflage, Oldenbourg, 1995. Aufgabe 4.8., p. 37.
Lösung:
\(\lim_{t\to 0}x(t) = 0\), \(\lim_{t\to \infty}x(t) = 0\)
\(\lim_{t\to 0}x(t) = 0\), \(\lim_{t\to \infty}x(t) = 1\)
\(\lim_{t\to 0}x(t) = 0\), \(\lim_{t\to \infty}x(t) = \infty\)
Aufgabe 3: Anfangs- und Endwertsatz¶
Bestimmen Sie das Verhalten von \(x(t)\) für \(t\rightarrow 0\) und \(t\rightarrow \infty\), wenn die Lapalacetransformierte \(X(s)\) von \(x(t)\) folgenden Ausdruck hat: \(X(s) = \dfrac{4(s+3)}{s(s+6)}\).
Quelle: Jörgl: Repetitorium Regelungstechnik - Band 1. 2. Auflage, Oldenbourg, 1995. Aufgabe 4.8.d), p. 37.
Lösung: \(\lim_{t\to 0}x(t)=4\), \(\lim_{t\to \infty}x(t)=2\)
Aufgabe 4: Anfangs- und Endwertsatz¶
Ermitteln Sie für folgende Übertragungsfunktionen mit Hilfe des Anfangs- und Endwertsatzes die Anfangs- und Endwerte der jeweiligen Sprunganwort.
(a) \(G(s) = \dfrac{1}{(s + 1)(s + 2)}\),\(\;\) (b) \(G(s) = \dfrac{s(s + 1)}{s + 2}\),\(\;\) (c) \(G(s) = \dfrac{s + 1}{s + 1}\),\(\;\) (d) \(G(s) = \dfrac{1 + 10s}{1 + 2s}\)
Quelle: vgl. Haager p. 18 und p. 150
Lösung: (a) AW = \(0\) und EW = \(0,5\), (b) AW = \(\infty\) und EW = \(0\), (c) AW = \(1\) und EW = \(1\), (d) AW = \(5\) und EW = \(1\)
Aufgabe 5: Blockschaltbild, Übertragungsfunktion¶
Bestimmen Sie die Übertragungsfunktion des folgenden Blockschaltbilds.
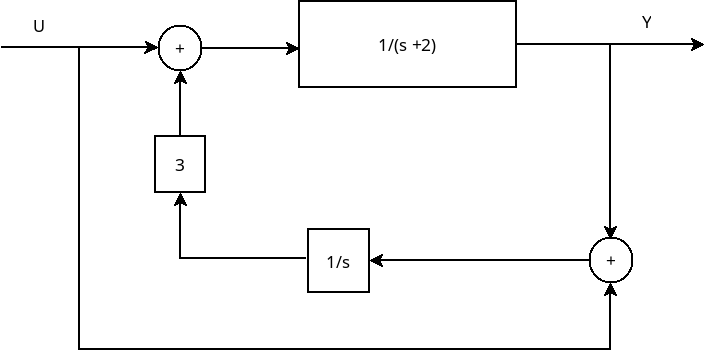
Quelle: Jörgl: Repetitorium Regelungstechnik - Band 1. 2. Auflage, Oldenbourg, 1995. Aufgabe 5.5, p. 52.
Lösung: \(G(s) = \dfrac{1}{s-1}\)
Aufgabe 6: Blockschaltbild, Übertragungsfunktion¶
Bestimmen Sie die Führungsübertragungsfunktion \(G_W(s)\) und die Störübertragungsfunktion \(G_Z(s)\) des folgenden Blockschaltbilds.
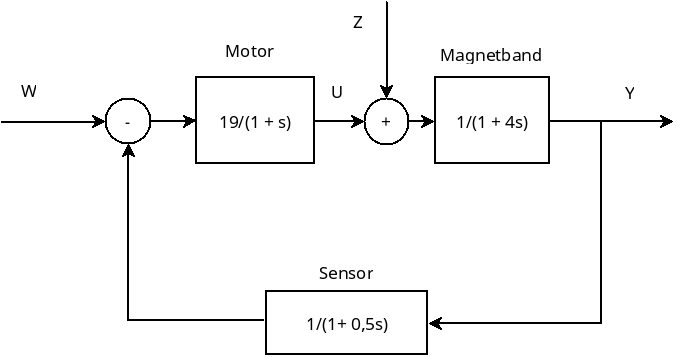
Hinweis: \(Y(s) = G_W(s) W(s) + G_Z(s) Z(s)\)
Quelle: Jörgl: Repetitorium Regelungstechnik - Band 1. 2. Auflage, Oldenbourg, 1995. Aufgabe 5.7, p. 53.
Lösung:
\(G_W(s) = \frac{19(1 + 0,5s)}{2s^3 + 6,5s^2 + 5,5s + 20}\), \(G_Z(s) = \frac{(1 + s)(1 + 0,5s)}{2s^3 + 6,5s^2 + 5,5s + 20}\)
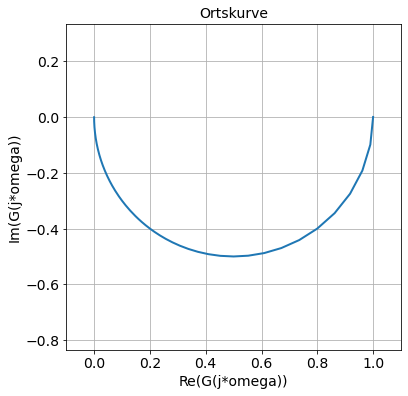
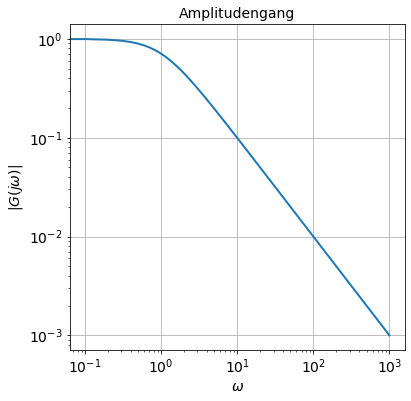
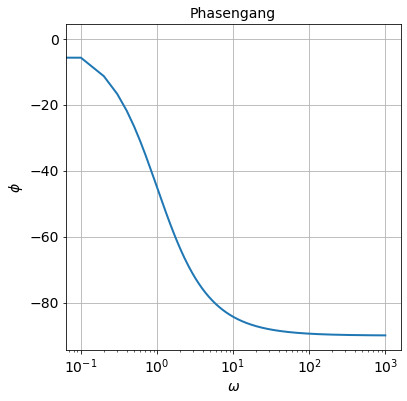
Aufgabe 7: Frequenzgang¶
Plotten Sie den Frequenzgang eines RC-Spannungsteilers: Input = Spannung an R und C, Output = Spannung an C
Lösung:
R = 1
C = 1
omega = linspace(0, 1000, 10000) # rad/sec
G = 1/( 1 + (omega*R*C)*1j )
figure(figsize=(6,6))
plot(G.real, G.imag, '-')
title('Ortskurve')
xlabel('Re(G(j*omega))')
ylabel('Im(G(j*omega))')
axis('equal')
xlim(-0.1, 1.1)
grid(True)
figure(figsize=(6,6))
loglog(omega, absolute(G))
xlabel('$\omega$')
ylabel('$|G(j\omega)|$')
title('Amplitudengang')
grid(True)
figure(figsize=(6,6))
semilogx(omega, angle(G, deg = True))
xlabel('$\omega$')
ylabel('$\phi$')
title('Phasengang')
grid(True)
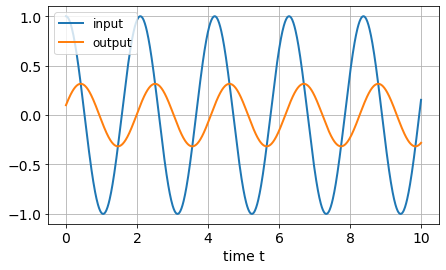
omega = 3
t = linspace(0, 10, 1000)
r = exp(1j*omega*t) # complex input
G = 1/( 1 + (omega*R*C)*1j )
c = G*r # complex output
figure(figsize=(7,4))
plot(t, r.real, label='input')
plot(t, c.real, label='output')
xlabel('time t')
legend()
grid(True)
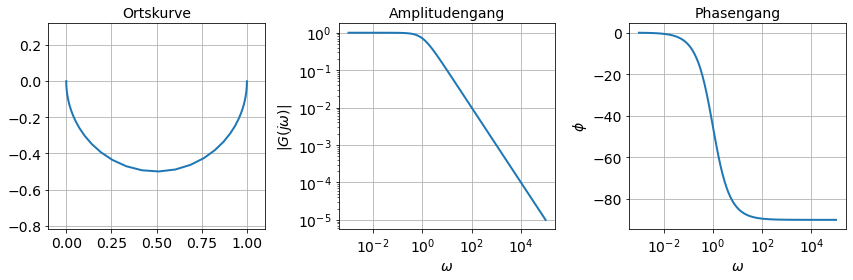
Aufgabe 8: Frequenzgang¶
Skizzieren Sie ohne Computer von Hand den Frequenzgang der Übertragungsfunktion \(G(s)=\dfrac{1}{1 + s}\), d. h.
Orstkurve
Amplitudengang
Phasengang
Lösung:
omega = logspace(-3, 5, 100) # rad/sec
G = 1/(1 + omega*1j)
figure(figsize=(12, 4))
#fig.set_size_inches(14, 4)
subplot(1,3,1)
plot(G.real, G.imag, '-')
axis('equal')
xlim(-0.1, 1.1)
title('Ortskurve')
grid(True)
subplot(1,3,2)
loglog(omega, absolute(G), '-')
xlabel('$\omega$')
ylabel('$|G(j\omega)|$')
title('Amplitudengang')
grid(True)
subplot(1,3,3)
semilogx(omega, angle(G, deg = True), '-')
xlabel('$\omega$')
ylabel('$\phi$')
title('Phasengang')
grid(True)
tight_layout()
Aufgabe 9: Frequenzgang, Ortskurve¶
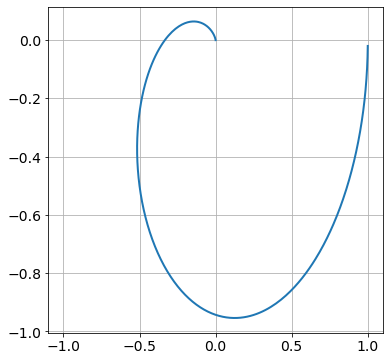
Plotten Sie die Orstkurve der Übertragungsfunktion \(G(s) = \dfrac{1}{(1 + s)(1 + s + s^2)}\).
Bei welcher Kreisfrequenz \(\omega_1\) schneidet die Orstkurve die relle Achse? Wie groß ist dabei die Amplitudenverstärkung?
Quelle: Haager p. 41 und p. 151
Lösung:
Siehe Code
\(\text{Im}(G(j\omega)) = \dfrac{\omega^3 - 2\omega}{(1 + \omega^2)( (1-\omega^2)^2 + \omega^2 )}\), \(\omega_1 = \sqrt{2}\), \(|G(j\omega_1)| = \frac{1}{3}\)
#omega = linspace(0, 1000, 10000) # rad/sec
omega = logspace(-2, 4, 1000) # rad/sec
G = 1/( (1 + omega*1j)*(1 + omega*1j - omega**2) )
figure(figsize=(6,6))
plot(G.real, G.imag, '-')
xlim(-1.1, 1.1)
grid(True)
omega1 = sqrt(2) # rad/sec
G1 = 1/( (1 + omega1*1j)*(1 + omega1*1j - omega1**2) )
G1
(-0.33333333333333326+7.401486830834373e-17j)
Aufgabe 10: Frequenzgang - allgemeine Schwingung¶
Die allgemeine Schwingungsgleichung lautet
Analysieren Sie anhand der Übertragungsfunktion
den Frequenzgang
die Stabilität in Abhängigkeit der Parameter \(\delta\) und \(\omega_0\).
Quelle: Philippsen p. 77 ff.
Verwenden Sie dazu das Python-Paket ipywidgets. Ein Code-Beispiel ist unten angegeben.
from ipywidgets import interact, fixed
def my_plot(k, d):
figure(figsize=(4,4))
x = linspace(-2, 5)
plot(x, k*x + d)
xlim(-2, 5)
ylim(-2, 5)
xlabel('x')
ylabel('y')
grid(True)
show()
return
interact(my_plot,
k = (-2.0, 3.0),
d = (-1.0, 3.0)
);
Lösung:
Frequenzgang:
def my_plot(omega_0, delta, plot_type):
omega = logspace(0, 3, 1000)
G = 1/( - omega**2 + 2*delta*omega*1j + omega_0**2)
if plot_type == 'Amplitudengang':
loglog(omega, absolute(G), '.-')
xlabel('$\omega$')
ylabel('$|G(j\omega)|$')
title('Amplitudengang')
elif plot_type == 'Phasengang':
semilogx(omega, angle(G, deg = True), '.-')
xlabel('$\omega$')
ylabel('$\phi$')
title('Phasengang')
grid(True)
show()
return
interact(my_plot,
omega_0 = ( 0.0, 100.0),
delta = ( 0.0, 5.0),
plot_type = ['Amplitudengang', 'Phasengang']
);
Stabilität: Der Nenner von \(G(s) = \dfrac{1}{s^2 + 2\delta s + \omega_0^2}\) ist Null bei \(s_{1,2} = -\delta \pm \sqrt{\delta^2 - \omega_0^2}\).
def my_plot(omega_0, delta, plot_type):
omega = logspace(0, 3, 1000)
if plot_type == 'Polstellen':
p = [1, 2*delta, omega_0**2] # p[0] * x**n + p[1] * x**(n-1) + ... + p[n-1]*x + p[n]
rs = roots(p)
for r in rs:
plot(r.real, r.imag, 'ok', label=str(r))
xlim(-25, 2)
ylim(-12, 12)
legend(loc = 'best', numpoints =1)
elif plot_type == 'Ortskurve':
G = 1/( - omega**2 + 2*delta*omega*1j + omega_0**2)
plot(0, 0, 'o')
plot(G.real, G.imag, '-')
axis('equal')
grid(True)
return
interact(my_plot,
omega_0 = ( 0.0, 10.0),
delta = ( -1.0, 10.0),
plot_type = ['Polstellen', 'Ortskurve'],
);
Aufgabe 11: Stabilität¶
Bestimmen Sie die Stabilität des rückgekoppelten Integrators mit DGL
Quelle: Philippsen, S. 142 f.
Aufgabe 12: Regelabweichung, Endwerttheorem¶
Die Regelstrecke mit der Übertragungsfunktion \(G(s)=\dfrac{1}{1+5s}\) wird mit dem Regler \(R(s)=k\) geregelt.
Wie ist die Verstärkung zu wählen, damit sich bei einer sprungförmigen Führungsgröße eine stationäre Regelabweichung von 10 % ergibt?
Quelle: Haager: Regelungstechnik. öbv & hpt, 2. Auflage, 2000. Aufgabe 1.2.4-2, p. 56., p. 153.
Lösung:
Übertragungsfunktion von Fehler zu Führungsgröße \(\dfrac{E(s)}{W(s)}=\dfrac{1 + 5s}{1 + 5s + k}\), Endwerttheorem: \(\dfrac{1}{1+k}=0.1\) für \(k=9\).
Aufgabe 13: Nyquistkriterium¶
Gegeben ist ein offenes System bestehend aus einem
Proportionalregler mit Verstärkung \(K\) vor der
Strecke mit Übertragungsfunktion \(\frac{1}{Ts + 1}\).
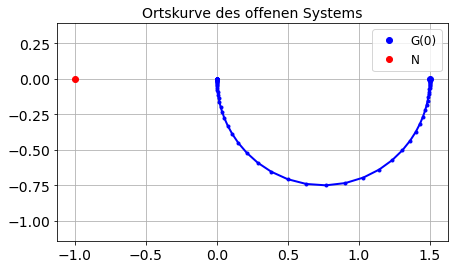
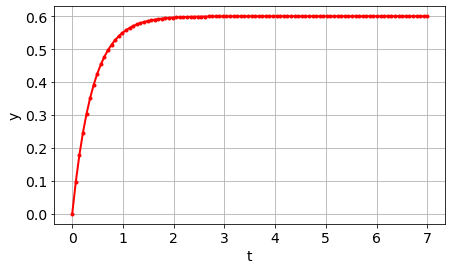
Untersuchen Sie mit dem Nyquistkriterium die Stabilität des geschlossenen Systems, indem Sie die
Ortskurve des offenen Systems und die
Sprungantwort des geschlossenen Systems
bestimmen. Verwenden Sie die Funktionen von SciPy Signal processing: Continuous-Time Linear Systems, um die Ergebnisse der Vorlesung anhand der zeitlichen Verläufe zu überprüfen.
Hinweis: Schauen Sie sich zuerst das Notebook RT_SciPy_Signal.ipynb an.
Quelle: Ogata 4th ed., S. 282 f.
Lösung:
from scipy import signal
# offenes System
K = 1.5
T = 1.0
num = [K]
den = [T, 1]
system_offen = signal.TransferFunction(num, den)
# Ortskurve des offenen Systems
omega = logspace(-3, 5, 100)
omega, G = system_offen.freqresp(omega)
figure(figsize=(7,4))
plot(G.real, G.imag, ".-b")
G0 = K # G(0)
plot(G0.real, G0.imag, "ob", label='G(0)')
N = -1
plot(N.real, N.imag, "or", label='N')
axis('equal')
legend()
title('Ortskurve des offenen Systems')
grid(True)
# Sprungantwort des geschlossenen Systems:
num = [K]
den = [T, 1 + K]
system_gesch = signal.TransferFunction(num, den)
t = linspace(0, 7, 100)
x0 = None
figure(figsize=(7,4))
t, y = signal.step(system_gesch, x0, t)
plot(t, y, '.-r')
xlabel('t')
ylabel('y')
grid(True)
Aufgabe 14: Regelungstechnik¶
Bestimmen Sie die Übertragungsfunktion des folgenden Blockschaltbilds.
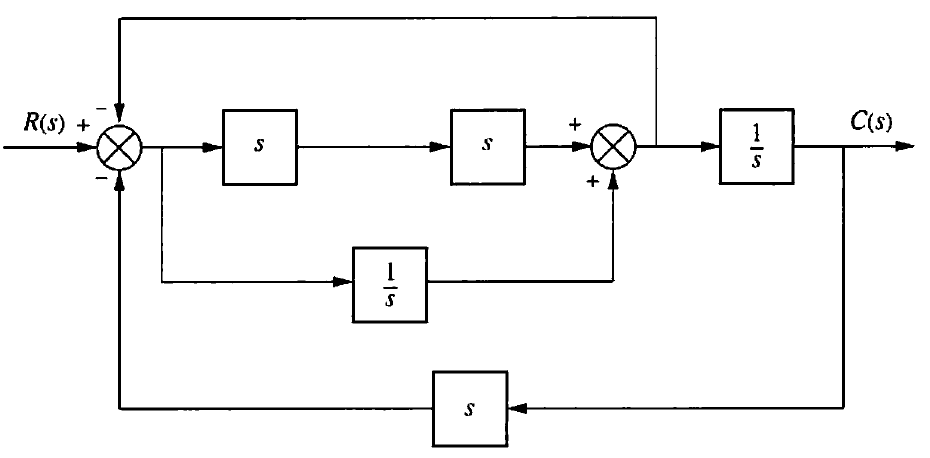
Quelle: Nise 6th ed. Skill-Assessment Exercise 5.1
Lösung:
\(\dfrac{s^3 + 1}{2s^4 + s^2 + 2s}\)