SciPy Signal
Contents
SciPy Signal¶
Dokumentation¶
%pylab inline
import scipy.signal as signal
%pylab is deprecated, use %matplotlib inline and import the required libraries.
Populating the interactive namespace from numpy and matplotlib
# set default values for plotting:
rcParams['axes.titlesize'] = 14
rcParams['axes.labelsize'] = 14
rcParams['xtick.labelsize'] = 14
rcParams['ytick.labelsize'] = 14
rcParams['legend.fontsize'] = 12
rcParams['lines.linewidth'] = 2
Aus der Hilfe zum Befehl signal.TransferFunction():
Construct the transfer function: \(H(s) = \frac{s^2 + 3s + 3}{s^2 + 2s + 1}\)
from scipy import signal
num = [1, 3, 3]
den = [1, 2, 1]
signal.TransferFunction(num, den)
Beispiele¶
Nise: Example 2.4¶
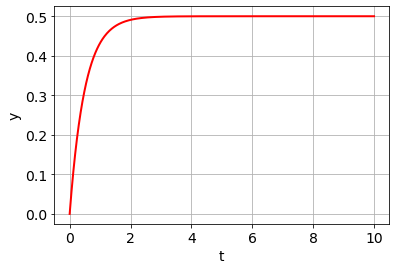
\(\dot{c} + 2c = r\) mit Null-Anfangsbedingungen hat die Übertragungsfunktion \(G(s) = \frac{1}{s + 2}\).
num = [1]
den = [1, 2]
system = signal.TransferFunction(num, den)
Sprungantwort \(y(t)\):
t = linspace(0, 10, 500)
x0 = None # Initial state-vector (default is zero)
t, y = signal.step(system, x0, t)
# Alternative:
# t, y = system.step(x0, t)
figure(figsize=(6,4))
plot(t, y, '-r')
xlabel('t')
ylabel('y')
grid(True)
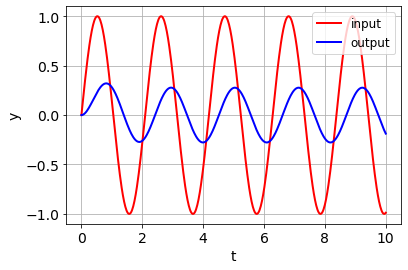
Output \(y(t)\) für allgemeinen Input \(u(t)\):
u = sin(3*t)
# u = t
t, y, x = signal.lsim(system, u, t)
figure(figsize=(6,4))
plot(t, u, '-r', label= 'input')
plot(t, y, '-b', label='output')
legend()
xlabel('t')
ylabel('y')
grid(True)
Nise: Example 2.3¶
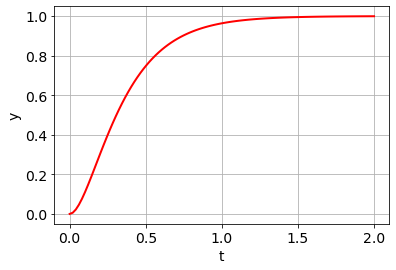
\(\ddot{y} + 12\dot{y} + 32y = 32u\) mit Null-Anfangsbedingungen hat die Übertragungsfunktion \(G(s) = \frac{32}{s^2 + 12s + 32}\) mit den Polen \(s=-4\) und \(s=-8\).
num = [32]
den = [1, 12, 32]
system = signal.TransferFunction(num, den)
Sprungantwort \(y(t)\):
t = linspace(0, 2, 100)
x0 = None
figure(figsize=(6,4))
t, y = signal.step(system, x0, t)
plot(t, y, '-r')
xlabel('t')
ylabel('y')
grid(True)
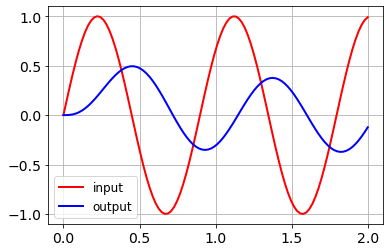
Output \(y(t)\) für allgemeinen Input \(u(t)\):
u = sin(7*t)
# u = t
t, y, x = signal.lsim(system, u, t)
figure(figsize=(6,4))
plot(t, u, '-r', label= 'input')
plot(t, y, '-b', label='output')
legend()
grid(True)
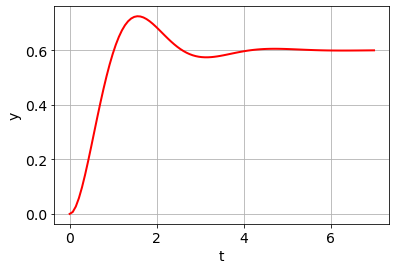
Nise: S. 41 f.¶
\(\ddot{y} + 2\dot{y} + 5y = 3u\) mit Null-Anfangsbedingungen hat die Übertragungsfunktion \(G(s) = \frac{3}{s^2 + 2s + 5}\) mit komplexen Polen.
num = [3]
den = [1, 2, 5]
system = signal.TransferFunction(num, den)
system.zeros
array([], dtype=float64)
system.poles
array([-1.+2.j, -1.-2.j])
Sprungantwort \(y(t)\):
t = linspace(0, 7, 100)
x0 = None
figure(figsize=(6,4))
t, y = signal.step(system, x0, t)
plot(t, y, '-r')
xlabel('t')
ylabel('y')
grid(True)
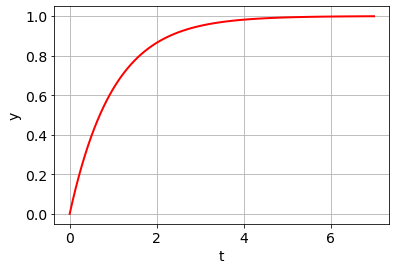
Rückgekoppelter Integrator¶
Philippsen S. 142 f.
Übertragungsfunktion \(\frac{1}{s - k}\)
Sprungantwort hat die Laplacetransformierte \(\frac{1}{(s - k)s} = \frac{1}{s^2 - ks}\).
k = 0
k = 1
k = -1
num = [1]
den = [1, -k]
system = signal.TransferFunction(num, den)
t = linspace(0, 7, 100)
x0 = None
figure(figsize=(6,4))
t, y = signal.step(system, x0, t)
plot(t, y, '-r')
xlabel('t')
ylabel('y')
grid(True)
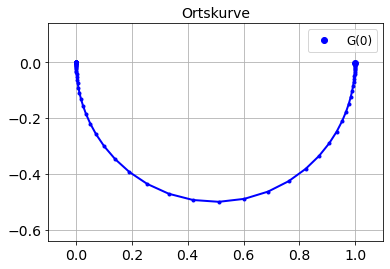
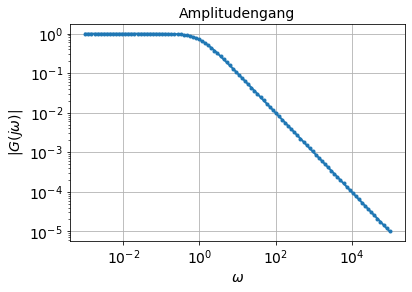
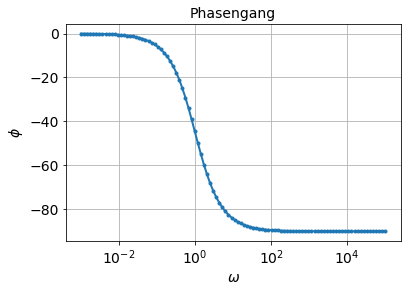
Frequenzgang¶
num = [1]
den = [1, 1]
system = signal.TransferFunction(num, den)
omega = logspace(-3, 5, 100)
omega, G = system.freqresp(omega)
plot(G.real, G.imag, ".-b")
plot(G[0].real, G[0].imag, "ob", label='G(0)')
axis('equal')
xlim(-0.1, 1.1)
title('Ortskurve')
legend()
grid(True)
loglog(omega, absolute(G), '.-')
xlabel('$\omega$')
ylabel('$|G(j\omega)|$')
title('Amplitudengang')
grid(True)
semilogx(omega, angle(G, deg = True), '.-')
xlabel('$\omega$')
ylabel('$\phi$')
title('Phasengang')
grid(True)
Aufgaben¶
Aufgabe 1: Reglerentwurf mit SciPy Signal¶
Auf den Seiten 7 und 8 der Vorlesungsunterlage RT_Anwendungen_pdfscan.pdf wurde das stationäre Regelkreisverhalten an Beispielen mit Hilfe des Endwertsatzes untersucht. Verwenden Sie die Funktionen von SciPy Signal processing: Continuous-Time Linear Systems, um die Ergebnisse der Vorlesung anhand der jeweiligen zeitlichen Verläufe \(w(t), z(t), x(t)\) und \(e(t)\) zu überprüfen.
Lösung:
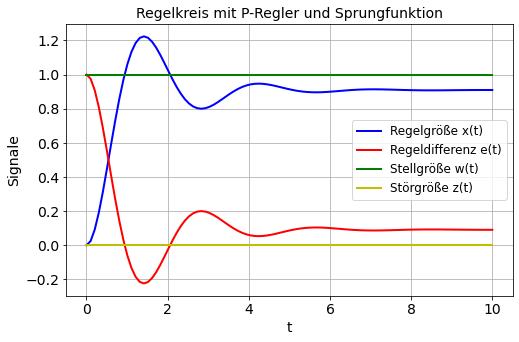
Fall 1a:
\(w(t) = 1\) … Sprungfunktion (für t>=0) -> \(W(s) = \frac{1}{s}\)
\(z(t) = 0\) -> \(Z(s) = 0\)
Verwendung eines P-Reglers \(R(s) = k\). Dann gilt:
\(G_o(s) = R(s)G_1(s)G_2(s) = \frac{k}{(1+s)(1+2s)}\).
Regelgröße \(X(s) = \frac{G_o}{1+G_o} W(s) = \frac{k}{2s^2+3s+k+1} \frac{1}{s}\).
Somit lautet die Führungsübertragungsfunktion: \(G_w(s) = \frac{k}{2s^2+3s+k+1}\).
Regeldifferenz (Error) \(E(s)= W(s) - X(s) = W(s) - \frac{G_o}{1+G_o} W(s)=\frac{1}{1+G_o} W(s) = \frac{2s^2+3s+1}{2s^2+3s+k+1} \frac{1}{s}\).
Somit lautet die Übertragungsfunktion für die Regeldifferenz: \(G_e(s) = \frac{2s^2+3s+1}{2s^2+3s+k+1}\).
# Fall 1a: Grafische Darstellung der Signale x(t), w(t), e(t) und z(t)
k = 10 # wählbar
x0 = None
numGw = [k]
denGw = [2, 3, k+1]
numGe = [2, 3, 1]
denGe = [2, 3, k+1]
systemGw = signal.TransferFunction(numGw, denGw)
systemGe = signal.TransferFunction(numGe, denGe)
t = linspace(0, 10, 100)
t, x = signal.step(systemGw, x0, t)
t, e = signal.step(systemGe, x0, t)
w = ones(len(t))
z = zeros(len(t))
figure(figsize=(8,5))
title('Regelkreis mit P-Regler und Sprungfunktion')
plot(t, x, '-b', label='Regelgröße x(t)')
plot(t, e, '-r', label='Regeldifferenz e(t)')
plot(t, w, '-g', label='Stellgröße w(t)')
plot(t, z, '-y', label='Störgröße z(t)')
xlabel('t')
ylabel('Signale')
legend()
grid(True)
Überprüfung der Ergebnisse mittels Endwertsatz
\(\lim_{t\to \infty}x(t) = \lim_{s\to 0}sX(s) = \lim_{s\to 0}s\frac{k}{2s^2 + 3s + k+1} \frac{1}{s} = \frac{k}{k+1}\)
\(\lim_{t\to \infty}e(t) = \lim_{s\to 0}sE(s) = \lim_{s\to 0}s\frac{2s^2+3s+1}{2s^2+3s+k+1} \frac{1}{s} = \frac{1}{k+1}\)
Endwertx = k/(k+1)
Endwerte = 1/(k+1)
print('Die Regelgröße x(t) stellt sich bei t gegen unendlich und k=',k,'auf',Endwertx,'ein.')
print('Die Regeldifferenz e(t) stellt sich bei t gegen unendlich und k=',k,'auf',Endwerte,'ein.')
Die Regelgröße x(t) stellt sich bei t gegen unendlich und k= 10 auf 0.9090909090909091 ein.
Die Regeldifferenz e(t) stellt sich bei t gegen unendlich und k= 10 auf 0.09090909090909091 ein.
Ergebnis Fall 1a:
Der Regelkreis mit dem P-Regler stellt sich zwar innerhalb weniger Zeiteinheiten (>7) ein (hört auf zu Schwingen), jedoch stellt sich die Regelgröße nicht auf den gewünschen Wert der Stellgröße ein. Es besteht demnach eine ständige Regeldifferenz. Eine Erhöhung des Faktors k des P-Regler verringert die Regeldifferenz, jedoch ist die Erhöhung des Verstärkungsfaktors k in der Praxis begrenzt.
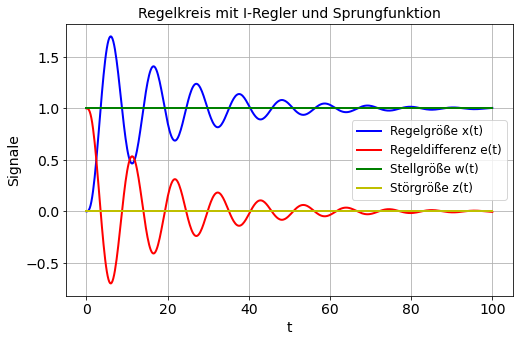
Fall 1b:
Wie Fall 1a, nur mit dem Unterschied der Verwendung eines I-Reglers (anstele eines P-Reglers): \(R(s) = \frac{1}{s}\). Nun gilt:
\(G_o(s) = R(s)G_1(s)G_2(s) = \frac{1}{s(1+s)(1+2s)}\).
Regelgröße \(X(s) = \frac{G_o}{1+G_o} W(s) = \frac{1}{2s^3+3s^2+s+1} \frac{1}{s}\)
Somit lautet die Führungsübertragungsfunktion: \(G_w(s) = \frac{1}{2s^3+3s^2+s+1}\).
Regeldifferenz (Error) \(E(s)= W(s) - X(s) = W(s) - \frac{G_o}{1+G_o} W(s)=\frac{1}{1+G_o} W(s) = \frac{2s^3+3s^2+s}{2s^3+3s^2+s+1} \frac{1}{s}\).
Somit lautet die Übertragungsfunktion für die Regeldifferenz: \(G_e(s) = \frac{2s^3+3s^2+s}{2s^3+3s^2+s+1}\)
# Fall 1b: Grafische Darstellung der Signale x(t), w(t), e(t) und z(t)
x0 = None
numGw = [1]
denGw = [2, 3, 1, 1]
numGe = [2, 3, 1, 0]
denGe = [2, 3, 1, 1]
systemGw = signal.TransferFunction(numGw, denGw)
systemGe = signal.TransferFunction(numGe, denGe)
t = linspace(0, 100, 500)
t, x = signal.step(systemGw, x0, t)
t, e = signal.step(systemGe, x0, t)
w = ones(len(t))
z = zeros(len(t))
figure(figsize=(8,5))
title('Regelkreis mit I-Regler und Sprungfunktion')
plot(t, x, '-b', label='Regelgröße x(t)')
plot(t, e, '-r', label='Regeldifferenz e(t)')
plot(t, w, '-g', label='Stellgröße w(t)')
plot(t, z, '-y', label='Störgröße z(t)')
xlabel('t')
ylabel('Signale')
legend()
grid(True)
Überprüfung der Ergebnisse mittels Endwertsatz:
\(\lim_{t\to \infty}x(t) = \lim_{s\to 0}sX(s) = \lim_{s\to 0}s\frac{1}{2s^3+3s^2+s+1} \frac{1}{s}=1\)
\(\lim_{t\to \infty}e(t) = \lim_{s\to 0}sE(s) = \lim_{s\to 0}s\frac{2s^3+3s^2+s}{2s^3+3s^2+s+1} \frac{1}{s}= 0\)
Endwertx = 1
Endwerte = 0
print('Die Regelgröße x(t) stellt sich bei t gegen unendlich auf',Endwertx,'ein.')
print('Die Regeldifferenz e(t) stellt sich bei t gegen unendlich auf',Endwerte,'ein.')
Die Regelgröße x(t) stellt sich bei t gegen unendlich auf 1 ein.
Die Regeldifferenz e(t) stellt sich bei t gegen unendlich auf 0 ein.
Ergebnis Fall 1b:
Der Regelkreis mit dem I-Regler schwingt zu Beginn sehr stark und stellt sich erst nach einer gewissen Zeit (>80 Zeiteinheiten) auf die Stellgröße ein. Bei t gegen Unendlich erreicht die Regelgröße den gewünschten Endwert der Stellgröße. Demnach exisitert bei t gegen Unendlich auch keine Regelabweichung.
Fall 2:
\(w(t) = t\) … Rampenfunktion —> \(W(s) = \frac{1}{s^2}\)
\(z(t) = 0\) —> \(Z(s) = 0\)
Verwendung eines I-Reglers: \(R(s) = \frac{1}{s}\). Nun gilt:
\(G_o(s) = R(s)G_1(s)G_2(s) = \frac{1}{s(1+s)(1+2s)}\).
Regelgröße \(X(s) = \frac{G_o}{1+G_o} W(s) = \frac{1}{2s^3+3s^2+s+1} \frac{1}{s^2}\) .
Somit lautet die Führungsübertragungsfunktion: \(G_w(s) = \frac{1}{2s^3+3s^2+s+1}\).
Regeldifferenz (Error) \(E(s)= W(s) - X(s) = W(s) - \frac{G_o}{1+G_o} W(s)=\frac{1}{1+G_o} W(s) = \frac{2s^3+3s^2+s}{2s^3+3s^2+s+1} \frac{1}{s^2}\).
Somit lautet die Übertragungsfunktion für die Regeldifferenz: \(G_e(s) = \frac{2s^3+3s^2+s}{2s^3+3s^2+s+1}\).
# Fall 2: Grafische Darstellung der Signale x(t), w(t), e(t) und z(t)
x0 = None
numGw = [1]
denGw = [2, 3, 1, 1]
numGe = [2, 3, 1, 0]
denGe = [2, 3, 1, 1]
systemGw = signal.TransferFunction(numGw, denGw)
systemGe = signal.TransferFunction(numGe, denGe)
t = linspace(0, 50, 500)
w = t # Rampenfunktion
t, x, a = signal.lsim(systemGw, w, t)
t, e, a = signal.lsim(systemGe, w, t)
z = zeros(len(t))
figure(figsize=(10,5))
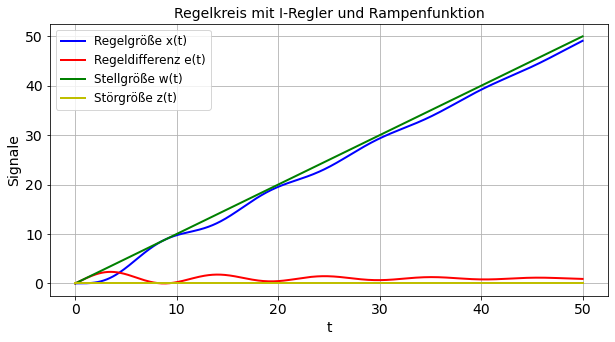
title('Regelkreis mit I-Regler und Rampenfunktion')
plot(t, x, '-b', label='Regelgröße x(t)')
plot(t, e, '-r', label='Regeldifferenz e(t)')
plot(t, w, '-g', label='Stellgröße w(t)')
plot(t, z, '-y', label='Störgröße z(t)')
xlabel('t')
ylabel('Signale')
legend()
grid(True)
Überprüfung der Ergebnisse mittels Endwertsatz:
\(\lim_{t\to \infty}x(t) = \lim_{s\to 0}sX(s) = \lim_{s\to 0}s\frac{1}{2s^3+3s^2+s+1} \frac{1}{s^2}=\infty\)
\(\lim_{t\to \infty}e(t) = \lim_{s\to 0}sE(s) = \lim_{s\to 0}s\frac{2s^3+3s^2+s}{2s^3+3s^2+s+1} \frac{1}{s^2}=\lim_{s\to 0}s\frac{s (2s^2+3s+1)}{2s^3+3s^2+s+1} \frac{1}{s^2}=1\)
Endwert_e = 1
print('Die Regelgröße x(t) geht bei t gegen unendlich ebenso auf UNENDLICH.')
print('Die Regeldifferenz e(t) stellt sich bei t gegen unendlich auf',Endwert_e,'ein.')
Die Regelgröße x(t) geht bei t gegen unendlich ebenso auf UNENDLICH.
Die Regeldifferenz e(t) stellt sich bei t gegen unendlich auf 1 ein.
# Darstellung der Regeldifferenz bei großen Zeiteinheiten
t = linspace(0, 400, 500)
figure(figsize=(9,5))
title('Regelkreis mit I-Regler und Sprungfunktion mit Augenmerk auf Regeldifferenz')
plot(t, x, '-b', label='Regelgröße x(t)')
plot(t, e, '-r', label='Regeldifferenz e(t)')
plot(t, w, '-g', label='Stellgröße w(t)')
plot(t, t, '-y', label='Störgröße z(t)')
ylim(0,5)
xlabel('t')
ylabel('Signale')
legend()
grid(True)
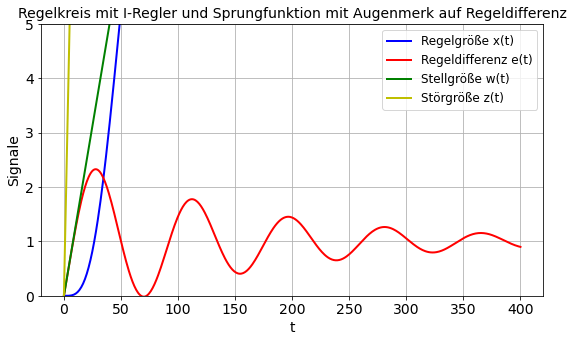
Ergebnis Fall 2:
Die Regelgröße folgt in diesem Beispiel nach einem Einschwingen der stetig ansteigenden Stellgröße. Bei t gegen Unendlich stellt sich eine Regelabweichung von 1 ein. Der Einschwingvorgang der Regelgröße und der Regeldifferenz dauert im Gegensatz zu den Fällen 1a und 1b sehr lange.
Fall 3:
\(w(t) = 0\) —> \(W(s) = 0\)
\(z(t) = 1\) … Sprungfunktion (für t>=0) —> \(Z(s) = \frac{1}{s}\)
Verwendung eines I-Reglers \(R(s) = \frac{1}{s}\). Nun gilt:
\(G_o(s) = R(s)G_1(s)G_2(s) = \frac{1}{s(1+s)(1+2s)}\).
Regelgröße \(X(s) = \frac{G_2}{1+G_o} Z(s) = \frac{1}{1+2s} \frac{s(1+s)(1+2s)}{2s^3+3s^2+s+1} \frac{1}{s}= \frac{s^2+s}{2s^3+3s^2+s+1} \frac{1}{s}\).
Somit lautet die Störungsübertragungsfunktion: \(G_z(s) = \frac{s^2+s}{2s^3+3s^2+s+1}\).
Regeldifferenz (Error) \(E(s)= W(s) - X(s) = -X(s) =-\frac{s^2+s}{2s^3+3s^2+s+1} \frac{1}{s}\).
Somit lautet die Übertragungsfunktion für die Regeldifferenz: \(G_e(s) = - \frac{s^2+s}{2s^3+3s^2+s+1}\).
# Fall 3: Grafische Darstellung der Signale x(t), w(t), e(t) und z(t)
x0 = None
numGw = [1, 1, 0]
denGw = [2, 3, 1, 1]
numGe = [-1, -1, 0]
denGe = [2, 3, 1, 1]
systemGw = signal.TransferFunction(numGw, denGw)
systemGe = signal.TransferFunction(numGe, denGe)
t = linspace(0, 80, 500)
t, x = signal.step(systemGw, x0, t)
t, e = signal.step(systemGe, x0, t)
w = zeros(len(t))
z = ones(len(t))
figure(figsize=(10,5))
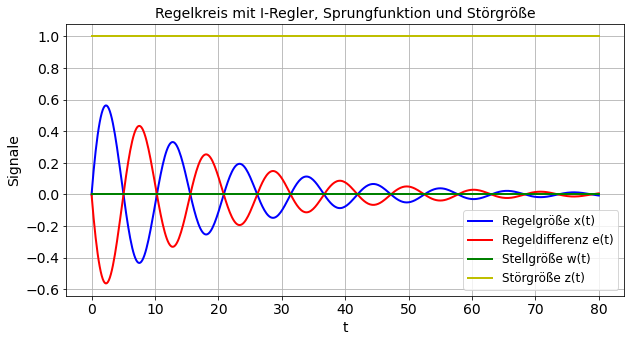
title('Regelkreis mit I-Regler, Sprungfunktion und Störgröße')
plot(t, x, '-b', label='Regelgröße x(t)')
plot(t, e, '-r', label='Regeldifferenz e(t)')
plot(t, w, '-g', label='Stellgröße w(t)')
plot(t, z, '-y', label='Störgröße z(t)')
xlabel('t')
ylabel('Signale')
legend()
grid(True)
Überprüfung der Ergebnisse mittels Endwertsatz:
\(\lim_{t\to \infty}x(t) = \lim_{s\to 0}sX(s) = \lim_{s\to 0}s\frac{s^2+s}{2s^3+3s^2+s+1} \frac{1}{s}=0\)
\(\lim_{t\to \infty}e(t) = \lim_{s\to 0}sE(s) = \lim_{s\to 0}s\frac{-s^2-s}{2s^3+3s^2+s+1} \frac{1}{s}=0\)
Ergebnis Fall 3:
Der Regelkreis mit Störgröße (Sprungfunktion) und ohne Stellgröße kann die Störung im Laufe der Zeit (>80 Zeiteinheiten) ausregeln, sprich eliminieren. Das bedeutet, dass bei diesem Regelkreis die Störgröße schlussendlich keinen Einfluss auf die Regelgröße hat. Die Regelgröße ist der Regeldifferenz um 180° phasenverschoben - klar, die Summe der beiden Größen ergibt die Stellgröße und diese beträgt Null.