Vorlesung
Contents
Vorlesung#
Konfiguration und Python-Pakete#
import numpy as np
import matplotlib.pyplot as plt
Gradientenverfahren#
Wir betrachten den Fall einer Minimierung ohne Nebenbedingungen und verwenden dafür ein einfaches Gradientenverfahren, nämlich das Verfahren des steilsten Abstiegs. Nachteil: oftmals sehr langsam.
Erster Versuch#
Wir betrachten die Minimierung einer \(n\)-dimensionalen Funktion \(y = f(x) = f(x_1, x_2, \ldots, x_n)\). Das Argument \(x\) ist hier also ein \(n\)-dimensionaler Vektor, den wir als Punkt im \(\mathbb{R}^n\) interpretieren. Am Startpunkt \(x_0\) bestimmen wir den Gradienten
Der Gradient bei \(x_0\) zeigt in die Richtung der stärksten Zunahme von \(f\) bei \(x_0\). Der negative Gradient \(-\nabla f(x_0)\) zeigt somit in die Richtung der stärksten Abnahme von \(f\) bei \(x_0\). Da wir ein Minimum finden wollen, entschließen wir uns, vom Startpunkt den Schritt \(-\nabla f(x_0)\) in die Richtung des steilsten Abstiegs zu gehen und landen danach beim Punkt
Diesen Vorgehensweise wiederholen wir solange, bis die Folge von Punkten \(x_0, x_1, x_2, \ldots\) sich nicht mehr (viel) ändert und daher \(\nabla f\) beim letzten Punkt \(x_N\) klein (genug) ist. Achtung: Aus \(\nabla f(p) = 0\) an einem Punkt \(p \in \mathbb{R}^n\) folgt nicht zwingend, dass \(p\) ein Minimum ist. Wir erhalten aus dem Verfahren also “nur” Kandidaten für Minima.
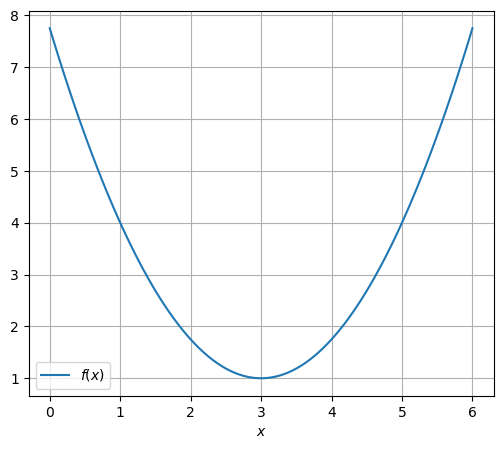
1-dim. Beispiele:
def f(x):
return 0.75*(x - 3)**2 + 1
def grad_f(x):
return 1.5*(x - 3)
x_plot = np.linspace(0, 6, num=100)
plt.figure(figsize=(6, 5))
plt.plot(x_plot, f(x_plot), label='$f(x)$')
plt.xlabel('$x$')
plt.legend()
plt.grid(True)
eps = 1e-3 # x-Genauigkeit und Genauigkeit für Gradienten
K = 20 # maximale Anzahl an Iterationsschritten
x = [5.5] # Startstelle am Beginn der Liste der besuchten Stellen
k = 0
while k < K:
x_new = x[k] - grad_f(x[k])
x.append(x_new)
k += 1
if np.abs(x[k] - x[k-1]) < eps:
break
print(f"letzte Stelle x[{k}] = {x[k]:.16f}")
letzte Stelle x[13] = 2.9996948242187500
for k, x_k in enumerate(x):
print(f"x[{k:2.0f}] ={x_k:20.16f}")
x[ 0] = 5.5000000000000000
x[ 1] = 1.7500000000000000
x[ 2] = 3.6250000000000000
x[ 3] = 2.6875000000000000
x[ 4] = 3.1562500000000000
x[ 5] = 2.9218750000000000
x[ 6] = 3.0390625000000000
x[ 7] = 2.9804687500000000
x[ 8] = 3.0097656250000000
x[ 9] = 2.9951171875000000
x[10] = 3.0024414062500000
x[11] = 2.9987792968750000
x[12] = 3.0006103515625000
x[13] = 2.9996948242187500
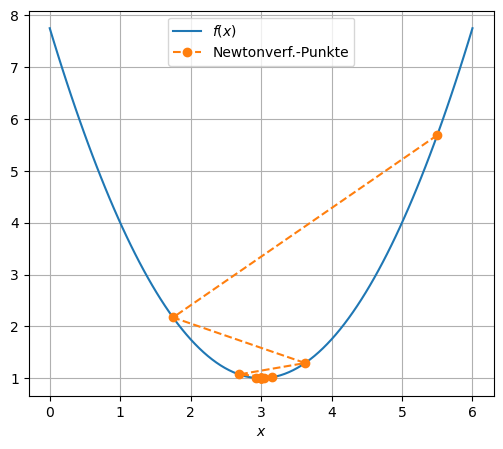
x_array = np.array(x)
plt.figure(figsize=(6, 5))
plt.plot(x_plot, f(x_plot), label='$f(x)$')
plt.plot(x_array, f(x_array), 'o--', label='Newtonverf.-Punkte')
plt.xlabel('$x$')
plt.legend()
plt.grid(True)
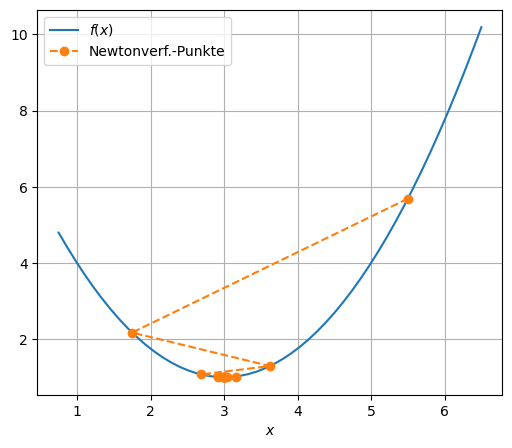
Um das Verfahren besser für verschiedene Funktionen und Startwerten vergleichen zu können, erstellen wir eine Python-Funktion:
def V(f, grad_f, x_0, eps=1e-3, K=20,
print_x=True, plot_graph=True):
"""
1-dim (zu) simples Verfahren zur Minimierung ohne
Nebenbedingungen mittels Gradientenschritt
"""
x = [x_0] # Startstelle am Beginn der Liste der besuchten Stellen
k = 0
while k < K:
x_new = x[k] - grad_f(x[k])
x.append(x_new)
k += 1
if np.abs(x[k] - x[k-1]) < eps:
break
print(f"letzte Stelle x[{k}] = {x[k]:.16f}")
if print_x:
for k, x_k in enumerate(x):
print(f"x[{k:2.0f}] ={x_k:20.16f}")
if plot_graph:
x_array = np.array(x)
x_plot = np.linspace(np.min(x_array) - 1,
np.max(x_array) + 1)
plt.figure(figsize=(6, 5))
plt.plot(x_plot, f(x_plot), label='$f(x)$')
plt.plot(x_array, f(x_array), 'o--', label='Newtonverf.-Punkte')
plt.xlabel('$x$')
plt.legend()
plt.grid(True)
f = lambda x: 0.75*(x - 3)**2 + 1
grad_f = lambda x: 1.5*(x - 3)
x_0 = 5.5
V(f, grad_f, x_0)
letzte Stelle x[13] = 2.9996948242187500
x[ 0] = 5.5000000000000000
x[ 1] = 1.7500000000000000
x[ 2] = 3.6250000000000000
x[ 3] = 2.6875000000000000
x[ 4] = 3.1562500000000000
x[ 5] = 2.9218750000000000
x[ 6] = 3.0390625000000000
x[ 7] = 2.9804687500000000
x[ 8] = 3.0097656250000000
x[ 9] = 2.9951171875000000
x[10] = 3.0024414062500000
x[11] = 2.9987792968750000
x[12] = 3.0006103515625000
x[13] = 2.9996948242187500
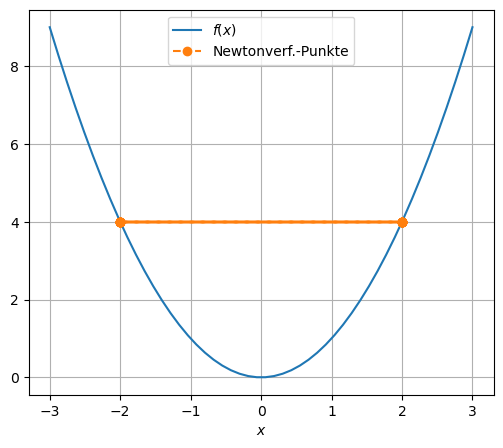
f = lambda x: x**2
grad_f = lambda x: 2*x
x_0 = 2
V(f, grad_f, x_0)
letzte Stelle x[20] = 2.0000000000000000
x[ 0] = 2.0000000000000000
x[ 1] = -2.0000000000000000
x[ 2] = 2.0000000000000000
x[ 3] = -2.0000000000000000
x[ 4] = 2.0000000000000000
x[ 5] = -2.0000000000000000
x[ 6] = 2.0000000000000000
x[ 7] = -2.0000000000000000
x[ 8] = 2.0000000000000000
x[ 9] = -2.0000000000000000
x[10] = 2.0000000000000000
x[11] = -2.0000000000000000
x[12] = 2.0000000000000000
x[13] = -2.0000000000000000
x[14] = 2.0000000000000000
x[15] = -2.0000000000000000
x[16] = 2.0000000000000000
x[17] = -2.0000000000000000
x[18] = 2.0000000000000000
x[19] = -2.0000000000000000
x[20] = 2.0000000000000000
f = lambda x: 1.5*x**2
grad_f = lambda x: 3*x
x_0 = 2
V(f, grad_f, x_0)
letzte Stelle x[20] = 2097152.0000000000000000
x[ 0] = 2.0000000000000000
x[ 1] = -4.0000000000000000
x[ 2] = 8.0000000000000000
x[ 3] =-16.0000000000000000
x[ 4] = 32.0000000000000000
x[ 5] =-64.0000000000000000
x[ 6] =128.0000000000000000
x[ 7] =-256.0000000000000000
x[ 8] =512.0000000000000000
x[ 9] =-1024.0000000000000000
x[10] =2048.0000000000000000
x[11] =-4096.0000000000000000
x[12] =8192.0000000000000000
x[13] =-16384.0000000000000000
x[14] =32768.0000000000000000
x[15] =-65536.0000000000000000
x[16] =131072.0000000000000000
x[17] =-262144.0000000000000000
x[18] =524288.0000000000000000
x[19] =-1048576.0000000000000000
x[20] =2097152.0000000000000000
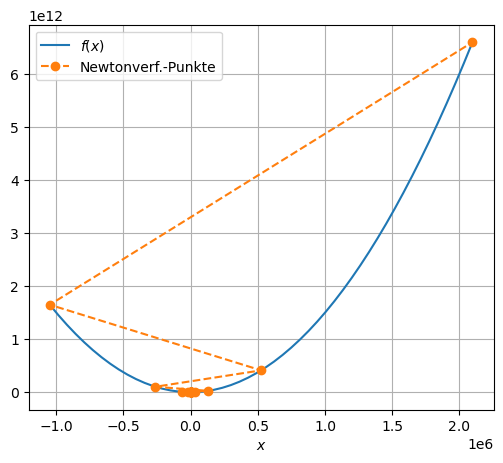
Die Schritte \(-\nabla f(x_k)\) sind in den letzten zwei Beispielen zu lange. Daher modifizieren wir unseren Algorithmus durch eine Anpassung der Schrittweite, d. h. der Länge des Schritts \(-\nabla f(x_k)\):
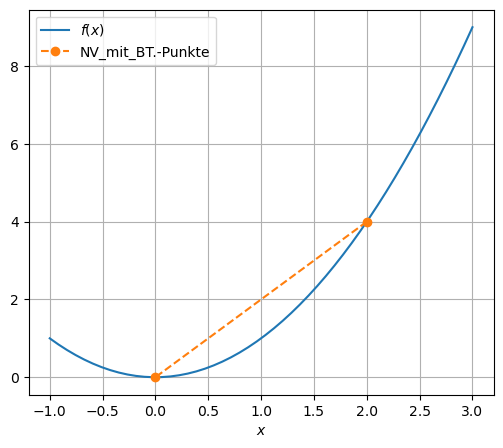
Backtracking#
Beim Backtracking halbiert man den Schritt so lange, bis der Funktionswert der neuen Stelle kleiner ist als der alte.
def BT_1dim(f, grad_f, x_0, eps=1e-3, K=20,
print_x=True, plot_graph=True):
"""
1-dim. Gradientenschritt mit Backtracking
"""
x = [x_0] # Startstelle am Beginn der Liste der besuchten Stellen
k = 0
while k < K:
t = 1
x_new = x[k] - t*grad_f(x[k])
while f(x_new) >= f(x[k]):
t = t/2
x_new = x[k] - t*grad_f(x[k])
x.append(x_new)
k += 1
if np.abs(x[k] - x[k-1]) < eps or np.abs(grad_f(x[k])) < eps:
break
print(f"letzte Stelle x[{k}] = {x[k]:.16f}")
if print_x:
for k, x_k in enumerate(x):
print(f"x[{k:2.0f}] ={x_k:20.16f}")
if plot_graph:
x_array = np.array(x)
x_plot = np.linspace(np.min(x_array) - 1,
np.max(x_array) + 1)
plt.figure(figsize=(6, 5))
plt.plot(x_plot, f(x_plot), label='$f(x)$')
plt.plot(x_array, f(x_array), 'o--', label='NV_mit_BT.-Punkte')
plt.xlabel('$x$')
plt.legend()
plt.grid(True)
if 1:
f = lambda x: x**2
grad_f = lambda x: 2*x
x_0 = 2
else:
f = lambda x: 1.5*x**2
grad_f = lambda x: 3*x
x_0 = 2
BT_1dim(f, grad_f, x_0)
letzte Stelle x[1] = 0.0000000000000000
x[ 0] = 2.0000000000000000
x[ 1] = 0.0000000000000000
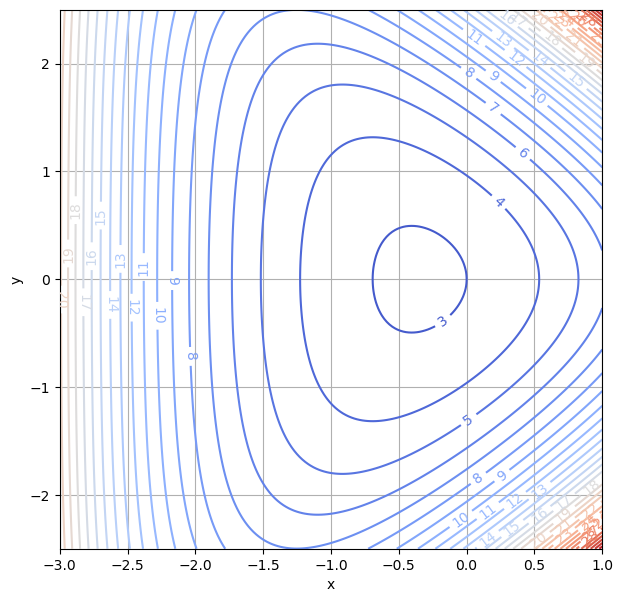
2-dim. Beispiel:
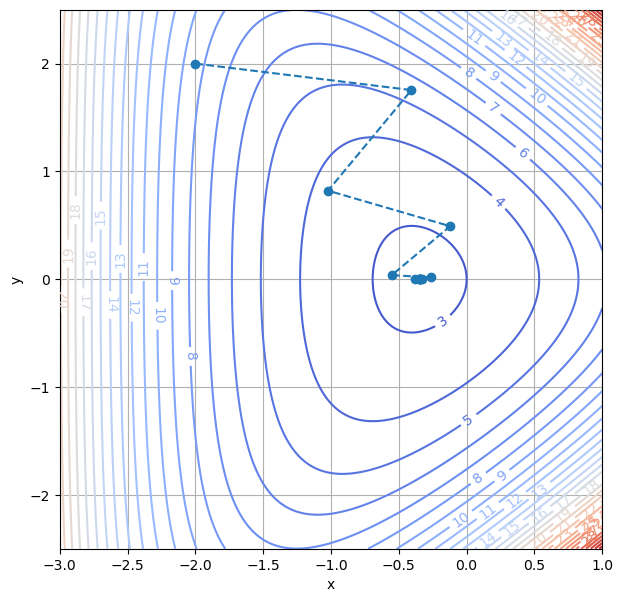
Wir suchen Minima der Funktion \(f(x,y) = e^{x + y} + e^{x - y} + e^{-x}\). Zuerst machen wir uns ein Bild, in diesem Fall einen Konturplot, der Funktion:
x = np.linspace(-3.0, 1.0, 200)
y = np.linspace(-2.5, 2.5, 200)
X, Y = np.meshgrid(x, y)
Z = np.exp(X + Y) + np.exp(X - Y) + np.exp(-X)
plt.figure(figsize=(7, 7))
cs = plt.contour(X, Y, Z, 30, cmap='coolwarm')
plt.clabel(cs, inline=1)
plt.xlabel('x')
plt.ylabel('y')
plt.grid(True)
Der Gradient von \(f(x,y) = e^{x + y} + e^{x - y} + e^{-x}\) ist \(\nabla f(x, y) = \begin{pmatrix} e^{x + y} + e^{x - y} - e^{-x} \\ e^{x + y} - e^{x - y} \end{pmatrix}\).
Für die Implementierung schreiben wir \(p_k = (x_k,y_k)\) und verwenden 1-dim numpy-arrays.
def f(p_k):
x = p_k[0]
y = p_k[1]
return np.exp(x + y) + np.exp(x - y) + np.exp(-x)
def grad_f(p_k):
x = p_k[0]
y = p_k[1]
f_x = np.exp(x + y) + np.exp(x - y) - np.exp(-x)
f_y = np.exp(x + y) - np.exp(x - y)
return np.array([f_x, f_y])
def BT_ndim(f, grad_f, p_0, eps=1e-3, K=20):
"""
n-dim. Gradientenschritt mit Backtracking
"""
p = [p_0] # Startstelle am Beginn der Liste der besuchten Stellen
k = 0
while k < K:
t = 1
p_new = p[k] - t*grad_f(p[k])
while f(p_new) >= f(p[k]):
t = t/2
p_new = p[k] - t*grad_f(p[k])
p.append(p_new)
k += 1
d = p[k] - p[k-1]
abstand = np.sqrt(np.sum([diff**2 for diff in d]))
grad_abs = np.sqrt(np.sum([g**2 for g in grad_f(p[k])]))
if abstand < eps or grad_abs < eps:
break
print(f"letzte Stelle p[{k}] = {p[k]}")
print(f" mit f(p[{k}]) = {f(p[k])}")
return p
p_0 = np.array([-2.0, 2.0])
p = BT_ndim(f, grad_f, p_0)
letzte Stelle p[12] = [-3.46756442e-01 2.47315177e-06]
mit f(p[12]) = 2.82842717203429
p_array = np.array(p)
plt.figure(figsize=(7, 7))
cs = plt.contour(X, Y, Z, 30, cmap='coolwarm')
plt.plot(p_array[:, 0], p_array[:, 1], 'o--')
plt.clabel(cs, inline=1)
plt.xlabel('x')
plt.ylabel('y')
plt.grid(True)
2-dim. Beispiel: Die Rosenbrock-Funktion \(f(x,y)=(a-x)^{2}+b(y-x^{2})^{2}\) hat ein Minimum bei \((a,a^{2})\) mit \(f(a,a^2)=0\).
a = 1
b = 100
x = np.linspace(-2.0, 2.0, 200)
y = np.linspace(-1.0, 3.0, 200)
X, Y = np.meshgrid(x, y)
Z = (a - X)**2 + b*(Y - X**2)**2
plt.figure(figsize=(7, 7))
levels = np.linspace(0, 50, num=30)
cs = plt.contour(X, Y, Z, levels, cmap='coolwarm')
plt.clabel(cs, inline=1)
plt.xlabel('x')
plt.ylabel('y')
plt.grid(True)
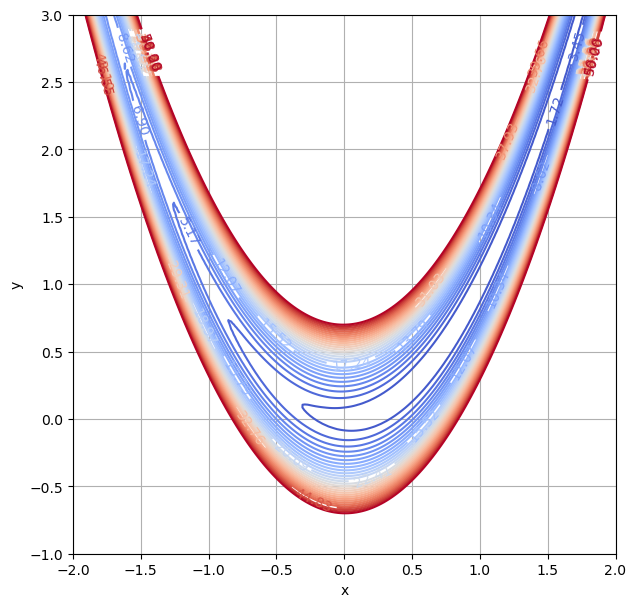
Der Gradient von \(f(x,y)=(a-x)^{2}+b(y-x^{2})^{2}\) ist \(\nabla f(x, y) = \begin{pmatrix} -2(a - x) - 4xb(y - x^2) \\ 2b(y - x^2) \end{pmatrix}\).
def f(p_k):
x = p_k[0]
y = p_k[1]
return (a - x)**2 + b*(y - x**2)**2
def grad_f(p_k):
x = p_k[0]
y = p_k[1]
f_x = -2*(a - x) - 4*x*b*(y - x**2)
f_y = 2*b*(y - x**2)
return np.array([f_x, f_y])
p_0 = np.array([-1.5, 1.95])
p = BT_ndim(f, grad_f, p_0)
letzte Stelle p[9] = [1.71515212 2.94477353]
mit f(p[9]) = 0.5123586641999825
p_array = np.array(p)
plt.figure(figsize=(7, 7))
levels = np.linspace(0, 50, num=30)
cs = plt.contour(X, Y, Z, levels, cmap='coolwarm')
plt.plot(p_array[:, 0], p_array[:, 1], 'o--')
plt.clabel(cs, inline=1)
plt.xlabel('x')
plt.ylabel('y')
plt.grid(True)
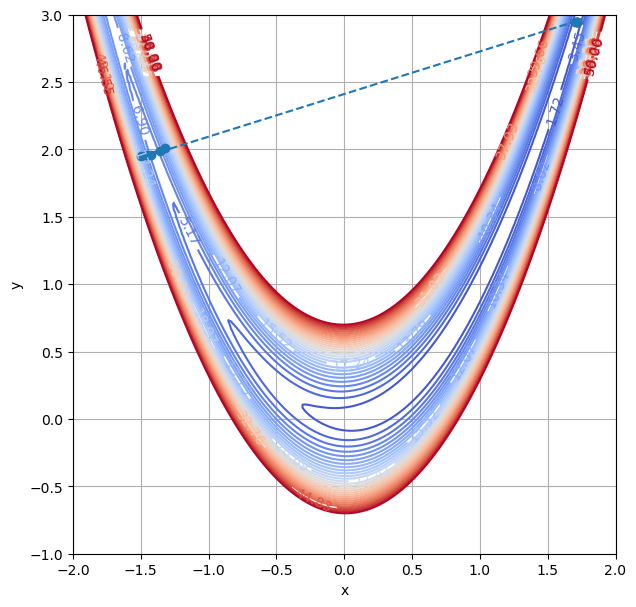
Unseren Algorithmus konvergiert nicht zum Minimum. Ausgeklügeltere Algorithmen schaffen das. Es wird auf folgende sehr kleine Auswahl an weiterführender Literatur verwiesen:
Nocedal, Jorge; Wright, S. (2006): Numerical Optimization. 2. Aufl., Springer-Verlag.
Vandenberghe, Lieven: lecture notes to the course Applied Numerical Computing at University of California, Los Angeles