Systeme von gewöhnlichen Differentialgleichungen - Vorlesung
Contents
Systeme von gewöhnlichen Differentialgleichungen - Vorlesung¶
Themenüberblick:
Matrixformulierung
Geschwindigkeitsvektorfeld im Phasenraum
Exponentiallösung
Lösung mittels Eigenwerten und -vektoren
Anwendungen: Elektrotechnik, Umschreiben von GDGL zweiter Ordnung, Mechanik, Wärmetauscher, gekoppelte Schwingungen
zusätzliche Unterlagen: 16_Differentialgleichungen_Teil_2-scan.pdf
%pylab inline
%config InlineBackend.figure_format = 'svg'
%pylab is deprecated, use %matplotlib inline and import the required libraries.
Populating the interactive namespace from numpy and matplotlib
Homogenes Beispiel: freie Schwingung¶
Umformulierung von GDGL 2-ter Ordnung auf ein GDGL System
Die GDGL 2-ter Ordnung \(\ddot{y} + \frac{d}{m}\dot{y} + \frac{k}{m}y = 0\) der gedämpften harmonischen Schwingung aus der Mechanik läßt sich mit der neuen Größe \(v(t):=\dot{y}(t)\) (Geschwindigkeit) in das folgende System von zwei GDGL umschreiben:
Oder kürzer in Matrixnotation:
mit der konstanten quadratische Matrix \(A=\begin{pmatrix} 0 & 1 \\ -\frac{k}{m} & -\frac{d}{m} \end{pmatrix}\). Dabei bezeichnet \(x(t)=\begin{pmatrix} y(t) \\ v(t) \end{pmatrix}\) den Zustand(svektor) zum Zeitpunkt \(t\).
Physikalische Interpretation: Bewegung im Zustandsraum (Ort-Geschwindigkeits-Diagramm)
# Beispielparameterwerte:
m = 2
d = 0.25
k = 4
Graphische Darstellung des GDLG Systems als Vektorfeld:
y = linspace(-1, 1, 10)
v = linspace(-1, 1, 10)
y_, v_ = meshgrid(y, v)
figure(figsize=(4,4))
quiver(y_, v_, v_, -k/m*y_ - d/m*v_, scale=20)
axis('equal')
xlabel('y')
ylabel('v')
grid(True)

Lösungen sind Integralkurven, die den Vektoren tangential folgen.
Theorie der GDGL Systeme¶
Allgemeine Struktur: Es wird eine Kurve \(x(t)=\begin{pmatrix} x_1(t) \\ \vdots \\ x_n(t) \end{pmatrix}\in\mathbb{R}^n\) gesucht, die das GDLG System
für eine gegebene Funktion (zeitabhängiges Vektorfeld) \(f(x,t)\in\mathbb{R}^n\) und eine Anfangsbedingung \(x(0)=x_0\) erfüllt. In Komponenten lautet das GDLG System:
Geometrie: graphische Darstellung des GDLG Systems als Vektorfeld. Lösungen sind Integralkurven, die den Vektoren tangential folgen.
Lineare (in)homogene Systeme haben die allgemeine Struktur
mit einer konstanten quadratische Matrix A. Die allgemeine Lösung \(x(t)\) ist Summe aus einer partikulären Lösung \(x_p(t)\) und der allgemeinen Lösung \(x_h(t)\) der homogenen Gleichung \(\dot{x}(t) = Ax(t)\), also
Hinweis: Ansätze für eine partikuläre Lösung findet man für unterschiedliche Typen von Inhomogenitäten \(b(t)\) in der Literatur.
Lösung des homogenen GDGL Systems \(\dot{x}(t) = Ax(t)\) mittels Eigenwerten und Eigenvektoren:
Wir schreiben das GDGL System \(\dot{x}(t)=Ax(t)\) in der Eigenbasis von \(A\), d. h. in den Koordinaten der Eigenvektoren \(v_1\) bis \(v_n\) von \(A\):
Einsetzen in das GDGL System \(\dot{x}(t)=Ax(t)\) liefert
Die Komponenten der Eigenvektoren links und rechts müssen übereinstimmen, da die Eigenvektoren linear unabhängig sind. Daraus ergeben sich \(n\) entkoppelte GDGL erster Ordnung mit konstanten Koeffizienten:
Diese haben die Lösungen
Die Anfangswerte \(c_1(0)\) bis \(c_n(0)\) bestimmen wir aus dem linearen Gleichungssystem
also
wobei \(V\) die Matrix der Eigenvektoren in Spalten und \(c(0)\) der Spaltenvektor der Anfangswerte ist. Somit lautet die allgemeine Lösung des homogenen Systems
Hinweis: Falls zwei (oder mehrere) Eigenwerte von \(A\) übereinstimmen, gibt es Ansätze, die zu zusätzlichen Fundamentallösungen führen können. Mehr zu diesem Fall in der Literatur.
Lösung des inhomogenen GDGL Systems \(\dot{x}(t) = Ax(t) + b(t)\) mittels Eigenwerten und Eigenvektoren:
Wir schreiben das (der Einfachheit halber 2-dimensionale) GDGL System \(\dot{x}(t)=Ax(t) + b(t)\) in der Eigenbasis von \(A\), d. h. in den Koordinaten der Eigenvektoren \(v_1\) und \(v_2\):
Einsetzen in das GDGL System \(\dot{x}(t)=Ax(t) + b(t)\) liefert
Die Komponenten der Eigenvektoren links und rechts müssen wiederum übereinstimmen. Daraus ergeben sich zwei entkoppelte GDGL erster Ordnung:
Diese lassen sich einzeln mit den bekannten Methoden für lineare GDGL erster Ordnung lösen. Die Anfangswerte \(c_1(0)\) und \(c_2(0)\) bestimmen wir wieder aus dem linearen Gleichungssystem
also
Lösung des inhomogenen GDGL Systems \(\dot{x}(t) = Ax(t) + b(t)\) mittels Matrixexponential:
Das Matrixexponential ist definiert über die Exponentialreihe:
Das GDGL System \(\dot{x}(t) = Ax(t) + b(t)\) hat die Lösung
Wenn man z. B. den Anfangswert \(x_0\) in die Basis der Eigenvektoren \(v_i\) zerlegt, also \(x_0 = c_1(0) v _1 + \ldots + c_n(0) v_n,\) dann wird die allgemeine Lösung der homogenen Gleichung wieder zu \(x_h(t) = e^{At}x_0 = c_1(0) e^{\lambda_1 t} v_1 + \ldots c_n(0) e^{\lambda_n t} v_n.\)
Freie Schwingung: Lösung mittels Matrix-Exponential \(x(t) = e^{At}x_0\), da \(b(t)=0\).
from scipy.linalg import expm
t = linspace(0, 10, num=1000)
A = array([[ 0, 1],
[-k/m, -d/m]])
x0 = array([[0.0],
[0.9]])
x = zeros((2,len(t)))
for i in range(len(t)):
x[:,[i]] = dot(expm(A*t[i]), x0)
figure(figsize=(4,4))
quiver(y_, v_, v_, -k/m*y_ - d/m*v_, scale=30)
plot(x[0,:], x[1,:])
axis('equal')
xlabel('y')
ylabel('v')
grid(True)

figure(figsize=(5,3))
plot(t, x[0,:], label='y')
plot(t, x[1,:], label='v')
legend()
xlabel('t')
grid(True)

Schwingung: Lösung mittels Eigenwerten und Eigenvektoren
L, V = eig(A)
print("Eigenwerte:\n", L)
print("Eigenvektoren:\n", V)
Eigenwerte:
[-0.0625+1.41283182j -0.0625-1.41283182j]
Eigenvektoren:
[[-0.02551552-0.57678617j -0.02551552+0.57678617j]
[ 0.81649658+0.j 0.81649658-0.j ]]
c0 = solve(V, x0)
print(c0)
[[0.55113519+0.02438079j]
[0.55113519-0.02438079j]]
x = c0[0,0]*exp(L[0]*t)*V[:,[0]] + c0[1,0]*exp(L[1]*t)*V[:,[1]]
figure(figsize=(5,7))
subplot(2,1,1) # Realteile
plot(t, real(x[0,:]), label='Re(y)')
plot(t, real(x[1,:]), label='Re(v)')
xlabel('t')
legend(loc='best')
grid(True)
subplot(2,1,2) # Imaginärteile
plot(t, imag(x[0,:]), label='Im(y)')
plot(t, imag(x[1,:]), label='Im(v)')
xlabel('t')
legend(loc='best')
grid(True)

Inhomogenes Beispiel: elektrischer Schaltkreis¶
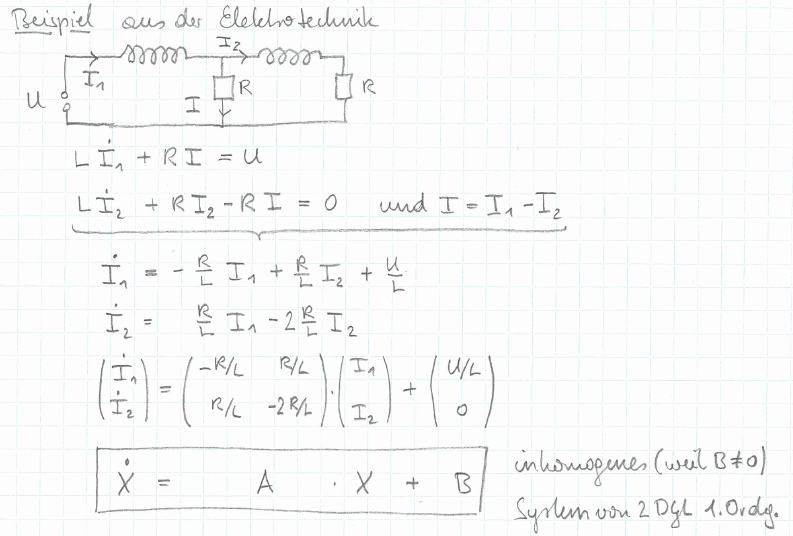
R = 5
L = 2
U = 100
t = linspace(0, 5, num=1000)
A = array([[-R/L, R/L],
[ R/L, -2*R/L]])
b = array([[U/L],
[0]])
x0 = array([[0],
[0]])
x = zeros((2, len(t)))
Elektrischer Schaltkreis: Lösung mittels Eigenwerten und Eigenvektoren
L, V = eig(A)
print(L)
print(V)
[-0.95491503 -6.54508497]
[[ 0.85065081 -0.52573111]
[ 0.52573111 0.85065081]]
d = solve(V, b)
print(d)
[[ 42.53254042]
[-26.28655561]]
c0 = solve(V, x0)
print(c0)
[[0.]
[0.]]
Vergleiche die Lösung \(y(t)= y(0)e^{-at} + \frac{b}{a}\left( 1 - e^{-at} \right)\) für \(\dot{y} + ay = b\) aus der Vorlesung über lineare gewöhnliche Differentialgleichungen 1. Ordnung.
c_t = array([[c0[0,0]*exp(L[0]*t) - d[0,0]/L[0]*(1 - exp(L[0]*t))],
[c0[1,0]*exp(L[1]*t) - d[1,0]/L[1]*(1 - exp(L[1]*t))]])
x = c_t[0,:]*V[:,[0]] + c_t[1,:]*V[:,[1]]
figure(figsize=(5,6))
subplot(2,1,1) # Realteile
plot(t, real(x[0,:]), label='Re($I_1$)')
plot(t, real(x[1,:]), label='Re($I_2$)')
xlabel('t')
legend()
grid(True)
subplot(2,1,2) # Imaginärteile
plot(t, imag(x[0,:]), label='Im($I_1$)')
plot(t, imag(x[1,:]), label='Im($I_2$)')
xlabel('t')
legend()
grid(True)

Übungsbeispiele¶
Allgemeine freie gedämpfte Schwingung:
Die GDGL 2-ter Ordnung \(\ddot{y} + 2\delta \dot{y} + \omega_0^2 y = 0\) läßt sich mit der neuen Größe \(v=\dot{y}\) umschreiben in das System
Oder kürzer:
if False: # Schwingung: delta < omega_0
omega_0 = 2.0
delta = 0.5
else: # keine Schwingung: delta > omega_0
omega_0 = 2.0
delta = 2.2
n = 4
t = linspace(0, 2*pi/omega_0*n, num=n*100)
A = array([[ 0, 1],
[-omega_0**2, -2*delta]])
x0 = array([[ 0.5 ],
[ 0.9 ]])
y = linspace(-1, 1, 10)
v = linspace(-1, 1, 10)
y_, v_ = meshgrid(y, v)
figure(figsize=(4,4))
quiver(y_, v_, v_, -omega_0**2*y_ - 2*delta*v_, scale=20)
axis('equal')
xlabel('y')
ylabel('v')
grid(True)

# Lösung via Eigenwerte und Eigenvektoren:
L, V = eig(A)
print("Eigenwerte:\n", L)
print("Eigenvektoren:\n", V)
Eigenwerte:
[-1.28348486 -3.11651514]
Eigenvektoren:
[[ 0.61460442 -0.30552813]
[-0.78883547 0.95218305]]
c0 = solve(V, x0)
print(c0)
[[2.18203677]
[2.75290346]]
x = c0[0,0]*exp(L[0]*t)*V[:,[0]] + \
c0[1,0]*exp(L[1]*t)*V[:,[1]]
figure(figsize=(6,5))
subplot(2,1,1) # Realteile
plot(t, real(x[0,:]), label='Re($y$)')
plot(t, real(x[1,:]), label='Re($v$)')
legend()
grid(True)
subplot(2,1,2) # Imaginärteile
plot(t, imag(x[0,:]), label='Im($y$)')
plot(t, imag(x[1,:]), label='Im($v$)')
legend()
grid(True)

figure(figsize=(4,4))
quiver(y_, v_, v_, -omega_0**2*y_ - 2*delta*v_, scale=20)
plot(real(x[0,:]), real(x[1,:]), linewidth=2)
axis('equal')
xlabel('y')
ylabel('v')
grid(True)

# Lösung via Matrix-Exponential x(t) = e^{At}x(0)
from scipy.linalg import expm
x = zeros((2, len(t)))
for k in range(len(t)):
x[:,[k]] = dot(expm(A*t[k]), x0)
figure(figsize=(4,4))
plot(x[0,:], x[1,:], linewidth=2)
xlabel('y')
ylabel('v')
axis('equal')
grid(True)

figure(figsize=(5,3))
plot(t, x[0,:], label='y')
plot(t, x[1,:], label='v')
xlabel('t')
legend()
grid(True)

Wärmetauscher:
MacCluer: Problem p. 137, Exercise 9.4 p. 142
<——————- \(T_2\) ————–
———————\(T_1\) ————->
<——————- \(T_2\) ————–
——————–> \(x\) ————–>
\(T_1\) … Temperatur der inneren Leitung
\(T_2\) … Temperatur der äußeren Leitung
Anfangswerte: \(T_1(0) = 290\) K und \(T_2(0) = 320\) K
Koeffizienten: \(k_1 > 0\) (Strömung nach rechts) und \(k_2 < 0\) (Strömung nach links)
L = 0.3
x = linspace(0, L)
T0= array([[290],
[320]])
k1 = +1.0
k2 = -2.0
A = array([[-k1, k1],
[ k2, -k2]])
print(A)
[[-1. 1.]
[-2. 2.]]
L, V = eig(A)
print(L)
print(V)
[0. 1.]
[[-0.70710678 -0.4472136 ]
[-0.70710678 -0.89442719]]
c0 = solve(V, T0)
print(c0)
[[-367.69552622]
[ -67.08203932]]
T = c0[0,0]*exp(L[0]*x)*V[:,[0]] + \
c0[1,0]*exp(L[1]*x)*V[:,[1]]
figure(figsize=(5,3))
plot(x, real(T[0,:]), label='$T_1$')
plot(x, real(T[1,:]), label='$T_2$')
legend(loc='best')
xlabel('x')
grid(True)

Gekoppeltes Federpendel:
Ein gekoppeltes Federpendel wird durch folgendes System GDGLen 2-ter Ordnung beschrieben:
Literatur: Dietmaier: Mathematik für Angewandte Wissenschaften. Gekoppelte Federpendel p. 464ff
Wir definieren \(\omega^2 = \frac{k}{m}\) und schreiben das GDGL System zweiter Ordnung um in ein System 1. Ordnung mit DGL \(\dot{x}(t) = Ax(t)\):
t = linspace(0, 10, num=100)
omega = 2.0
print('omega=', omega)
x0 = array([[0],
[1],
[0],
[0]])
print('x0=\n', x0)
A = array([[ 0, 0, 1, 0],
[ 0, 0, 0, 1],
[-2*omega**2, omega**2, 0, 0],
[ omega**2, -2*omega**2, 0, 0]])
print('A=\n', A)
omega= 2.0
x0=
[[0]
[1]
[0]
[0]]
A=
[[ 0. 0. 1. 0.]
[ 0. 0. 0. 1.]
[-8. 4. 0. 0.]
[ 4. -8. 0. 0.]]
L, V = eig(A)
print(L)
print(V)
[-4.44089210e-17+3.46410162j -4.44089210e-17-3.46410162j
1.55431223e-16+2.j 1.55431223e-16-2.j ]
[[ 1.50849604e-17+1.96116135e-01j 1.50849604e-17-1.96116135e-01j
-3.86191682e-17-3.16227766e-01j -3.86191682e-17+3.16227766e-01j]
[-4.62115343e-17-1.96116135e-01j -4.62115343e-17+1.96116135e-01j
-4.83126218e-17-3.16227766e-01j -4.83126218e-17+3.16227766e-01j]
[-6.79366220e-01+0.00000000e+00j -6.79366220e-01-0.00000000e+00j
6.32455532e-01-1.96606674e-16j 6.32455532e-01+1.96606674e-16j]
[ 6.79366220e-01-6.09651416e-17j 6.79366220e-01+6.09651416e-17j
6.32455532e-01+0.00000000e+00j 6.32455532e-01-0.00000000e+00j]]
c0 = solve(V, x0)
print(c0)
[[ 5.71971415e-17+1.27475488j]
[ 5.71971415e-17-1.27475488j]
[-1.84318757e-16+0.79056942j]
[-1.84318757e-16-0.79056942j]]
x = c0[0,0]*exp(L[0]*t)*V[:,[0]] + c0[1,0]*exp(L[1]*t)*V[:,[1]] + \
c0[2,0]*exp(L[2]*t)*V[:,[2]] + c0[3,0]*exp(L[3]*t)*V[:,[3]]
figure(figsize=(6,4))
subplot(2,1,1)
plot(t, real(x[0,:]), color='red', linewidth=2)
if True:
plot(t, sin((sqrt(3)-1)/2*omega*t), '--k')
plot(t, -sin((sqrt(3)-1)/2*omega*t), '--k')
xlabel('t')
ylabel('$y_1$')
grid(True)
subplot(2,1,2)
plot(t, real(x[1,:]), color='blue', linewidth=2)
if True:
plot(t, cos((sqrt(3)-1)/2*omega*t), '--k')
plot(t, -cos((sqrt(3)-1)/2*omega*t), '--k')
xlabel('t')
ylabel('$y_2$')
grid(True)

Alternativer Plot mit der Zeit als Ordinate:
figure(figsize=(5,5))
plot(0 + real(x[0,:]), t)
plot(0*ones(t.shape), t)
plot(3 + real(x[1,:]), t)
plot(3*ones(t.shape), t)
xlabel('$y_1$ und $y_2$')
ylabel('$t$')
grid(True)
